����������λ��iBeacon�������Ӧ�õķ���֮һ������������λ����ʵ������Ѱ·��Ѱ�����Ⱥܶ���ҵ�����ټ������Ķ�λϵͳҲ�ǻ���iBeacon����ʵ�ֵġ�������λ�ֿ��Է�Ϊһά��λ�Ͷ�ά��λ�����Ľ���������������λ������ʵ��ԭ����ʵ�ַ�����
����һά��λ
����ԭ��
����������λ�ĵײ㼼����������࣬������������ڡ���С����iBeacon��༰�ȶ������ʵ�֡�һ�����Ѿ�������ϸ���ܣ����ﲻ������
������νһά��λ��ʵ���Ƕ�������༼�������Ӧ�ã�ֻҪ�������ű��豸������ָ���㣬�������豸���ֻ����㹻�����ű�ʱ������Ϊ�û�������ָ���㡣֮���Գ�֮Ϊһά��λ������Ϊ��λ�����ȫ�������ű��豸��λ�ã�û���κ�����ά���ϵ���չ��
Ӧ��
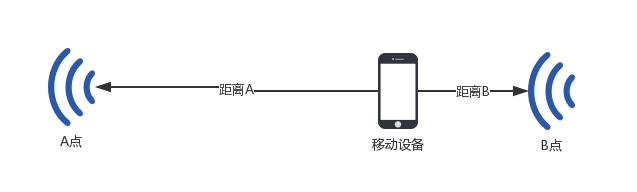
�������ַ�ʽͨ�����ڹ̶�·�ߵ���;����Ϊ·���ϵ��û��ṩ��λ��Ϣ��
�����ŵ��Dz���ɱ��Ϳ����ɱ��ܵͣ�ȱ����ֻ��Ӧ����·�߹̶������Ҷ�λ������̫�ܼ��ij��������͵����Ӿ��Ǿ����������������ڵ�·�����Ǿ�����Ƶģ��̶����Ҽ���Ψһ������֮��ľ���Ҳ����ܽ���������50m���ϵļ�ࡣֻҪ��;�Դ��¹̶��ļ�ಿ���ű��豸���Ϳ���Ϊ�û��ṩ���ʵʱ����ȷ�Ķ�λ��Ϣ��
����ʵ��
����һά��λ�IJ���dz���������������ֻҪȷ�����ű��豸����Ч���Ƿ�Χ��Ȼ����;����Ϳ��ԡ�����ͬʱ�ռ�ÿ�����ű��豸��λ����Ϣ����Ϊ����Ķ�λ�������ݡ�
�����������棬�ƶ��豸ֻҪ���յ����ź������������ҵ����������һ���ű��豸�����������ָ����Χ�ڣ��ͼ������豸��λ����Ϣ����Ϊ�û������˸õ�����
����̫���ˣ��Ͳ���˵�ˡ�
������ά��λ
����ԭ��
������ά��λ����˼�壬���ǿ���ʵ�ֶ�ά�ռ��е����ⶨλ����λ����Ҫ�����������������߹�ϵ��ʽ��
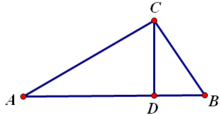
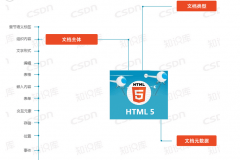
��������ͼ����֪���������߳��ȣ�CD�ǵױ�AB�Ĵ��ߣ�AD��BD�ij��ȼ��㹫ʽ�ֱ�Ϊ
- BD = (AB2+CB2-AC2)÷2AB
- AD = (AB2-CB2+AC2)÷2AB
��������˼·�ǣ����ű��豸�ڳ����ڰ�ָ���������״����ʹ�û��ڳ���������㶼���Խ��յ�3����������������߹���ֱ�ǵĶ�λ����Ϣ������ͼ
����ͨ�����������߹�ϵ��ʽ�����Լ������ͼ��px��py�ij��ȣ�Ҳ���ǵ�ǰ���ڵ�ǰ�����������е����ꡣ
�����ٸ��ݵ�ǰ���������������������е�λ�ã���ϲ����࣬�����ǰ�������������е����ꡣ
����Ӧ��
������ά��λ�������������κγ�����ͨ�������û��·�����̶������ɿռ��У�����չ�ᡢ�̳���
�����ŵ��dz�����Ӧ�Ը�ǿ��ȱ���Dz���ɱ��Ϳ����ɱ���Խϸߡ����̳�Ϊ�����ϸ��չ̶���ಿ�������ű꣬������Ҫ���ʵ�����ѡ����ʵľ��룬����ҲҪ����ʵ�ʼ������Ӧ�ļ�����������Ҫ���Dz���������Ĵ����������Ὣһά��λ�Ͷ�ά��λ���ʹ�á�
����ʵ��
��������ԭ������˵�����еㆪ�£���ͼ��ʵ�ܼ�
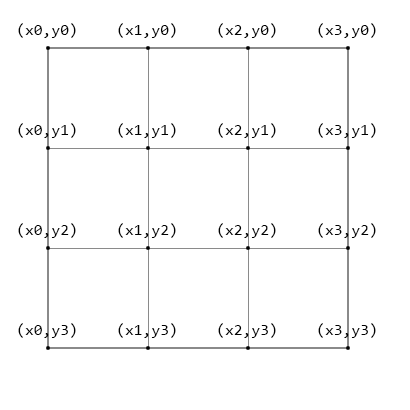
��������������һ��30m * 30m�ij��أ����ű��豸��10mΪ�����״���𣬹���Ҫ16���ű꣬ÿ���ű궼����ͼ��ʾ��ע��������Ϣ
������ʱ�û������ڳ����ڵ��κ�λ�ã���������9�������������е�һ�����ݲ������ٽ����������ô�ƶ��豸�յ��ľ��������4���ű�㣬Ӧ�þ��ǵ�ǰ���������ε�4�����㡣
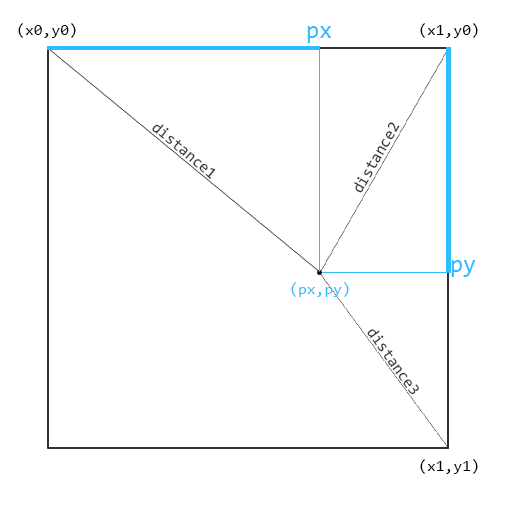
�������赱ǰ�û���ʱ�����Ͻǵ�һ���������У�����������������õ����������3���ű�㣬��Ӧ�ľ���ֱ�Ϊdistance1, distance2, distance3����ͼ
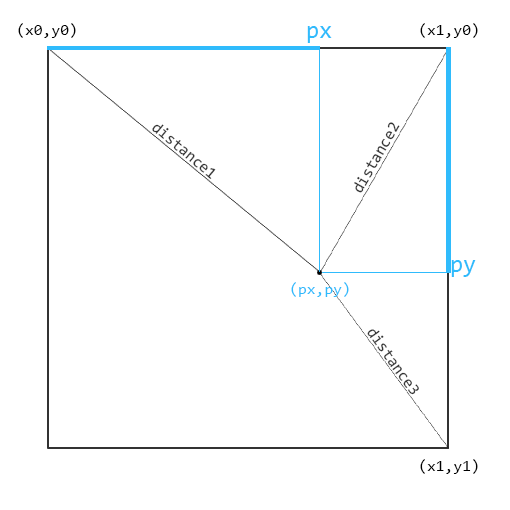
�����������������֪����������֪���������߹�ϵ��ʽ���Ե�px, py��ֵ��Ҳ���ǵ�ǰ���ڵ�ǰ�����е����ꡣ
��������֮ǰ��Ҫ���һ�����⣬�Ǿ���������֮��Ĺ�ϵ������֪��������϶���������Ϊֱ�ǣ����������������ں����ϣ����������������ϡ�����Ҫ��ϵ��������Ϣ����һ��������
- //�ж����㣨points���Ĺ�ϵ
- let xAxisPoints = [];
- let yAxisPoints = [];
- for (let i = 0; i < points.length; i++) {
- let point = points[i];
- //�ҵ�Y���
- let xNO = point.x;
- let yPoints = points.filter(e => e.x === xNO)
- if (yPoints.length >= 2) {
- yAxisPoints = yPoints.sort((a, b) => a.y - b.y)
- if (xAxisPoints.length) {
- break;
- }
- }
- //�ҵ�X���
- let yNO = point.y;
- let xPoints = points.filter(e => e.y === yNO)
- if (xPoints.length >= 2) {
- xAxisPoints = xPoints.sort((a, b) => a.x - b.x)
- if (yAxisPoints.length) {
- break;
- }
- }
- }
�������ˣ��ͺ����������λ��ĺ�����������������ˣ��ٷֱ���ϵ�ǰ���������������еĺ�����������꣬�͵õ������յĶ�λ���ꡣ
���������е�xAxisPoints��yAxisPoints�Ѿ���������Ϣ���������������һ�����xֵ���Լ����������һ�����yֵ���������������������еĺ�����������ꡣ
�����ܽ�
����һά��λ�Ͷ�ά��λ�ֱ��и��Ե�Ӧ�ó��������ж�ά��λ��ʵʩ��������˽ϸߵ�Ҫ����ʵ��������������Ҫ��һά��λ�Ͷ�ά��λ���ʹ�ã�������Ҫ��������ϴ�������������ļ��ݡ�
�����õ���λ��Ϣ������ֻ����Ŀ�ĵ�һ���������ڵ���ϵͳ�У���λ��Ϣ��Ҫƥ�������Ŀ��㣬�����������ܲſ��Կ�ʼʹ�á��л�������Ե���ϵͳ��ʵ�֣�����һ���ķ�����
ת����ע���� ����ת���ԣ���˼��Դ�� http://www.aseoe.com/show-47-1125-1.html